1实验背景与目的

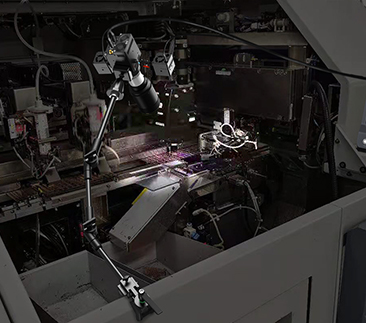
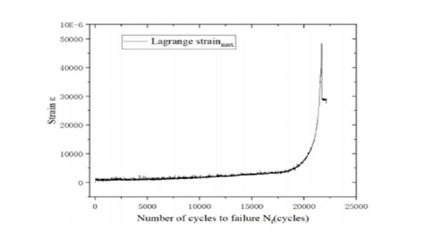
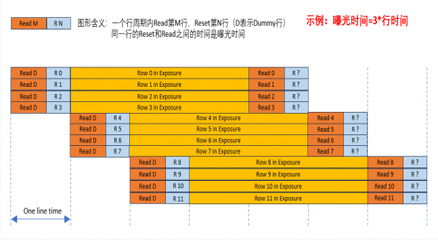
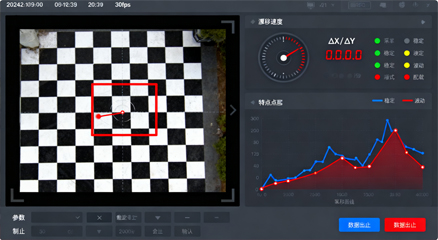
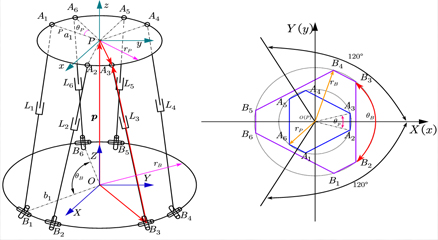
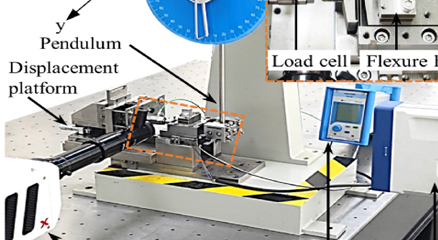
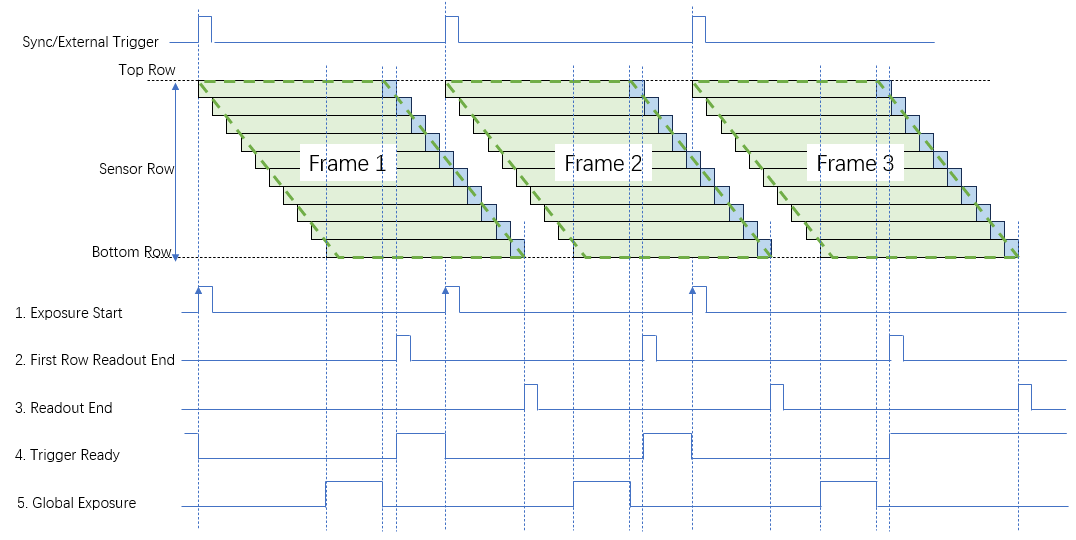
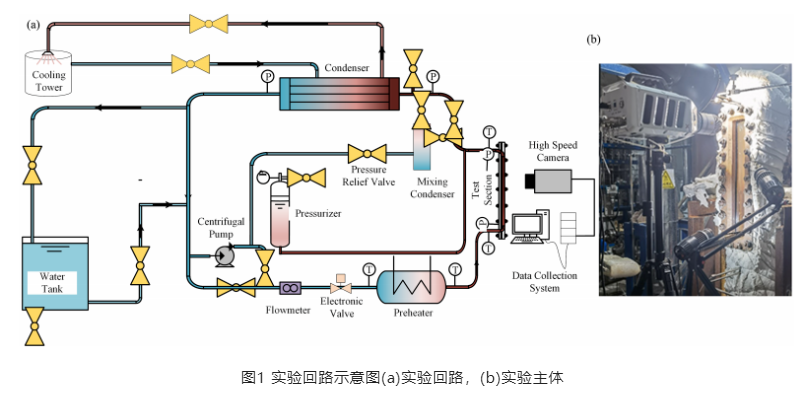
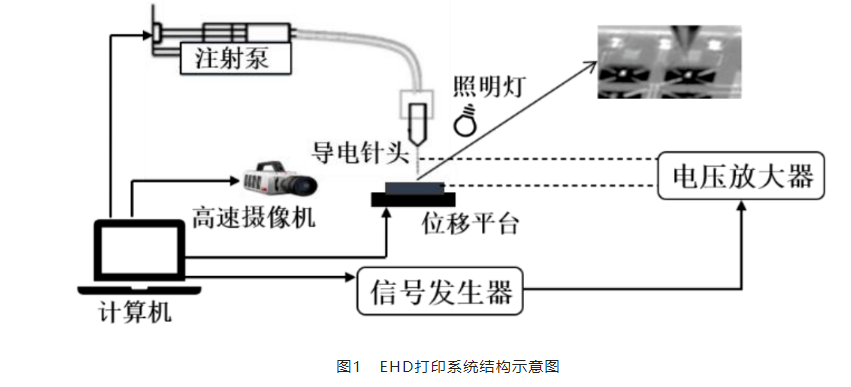
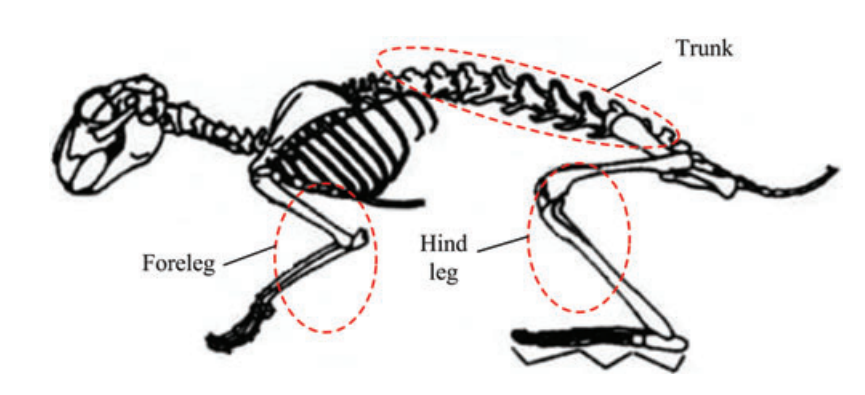
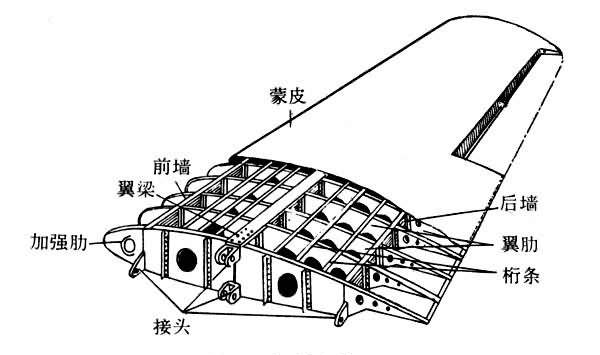
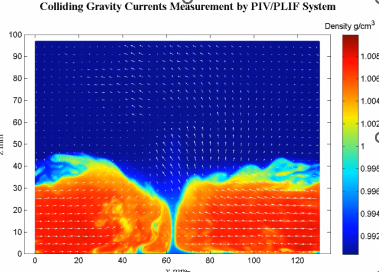
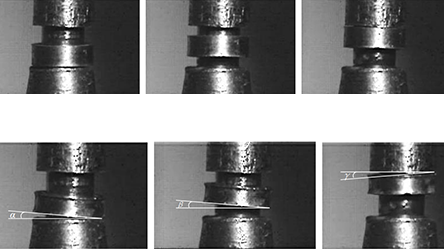
图1
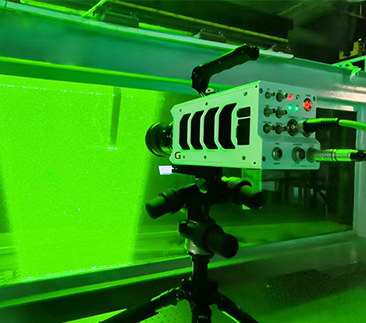
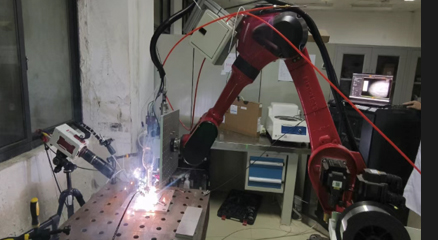
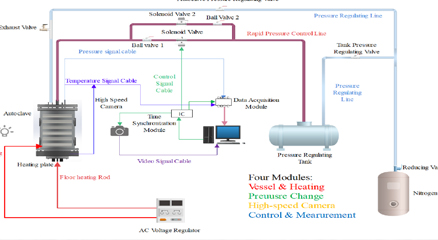
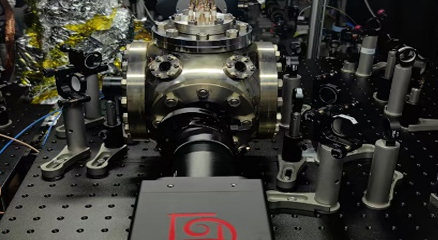
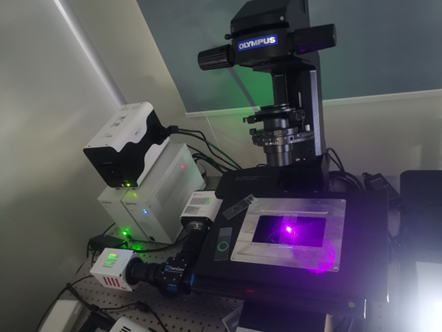
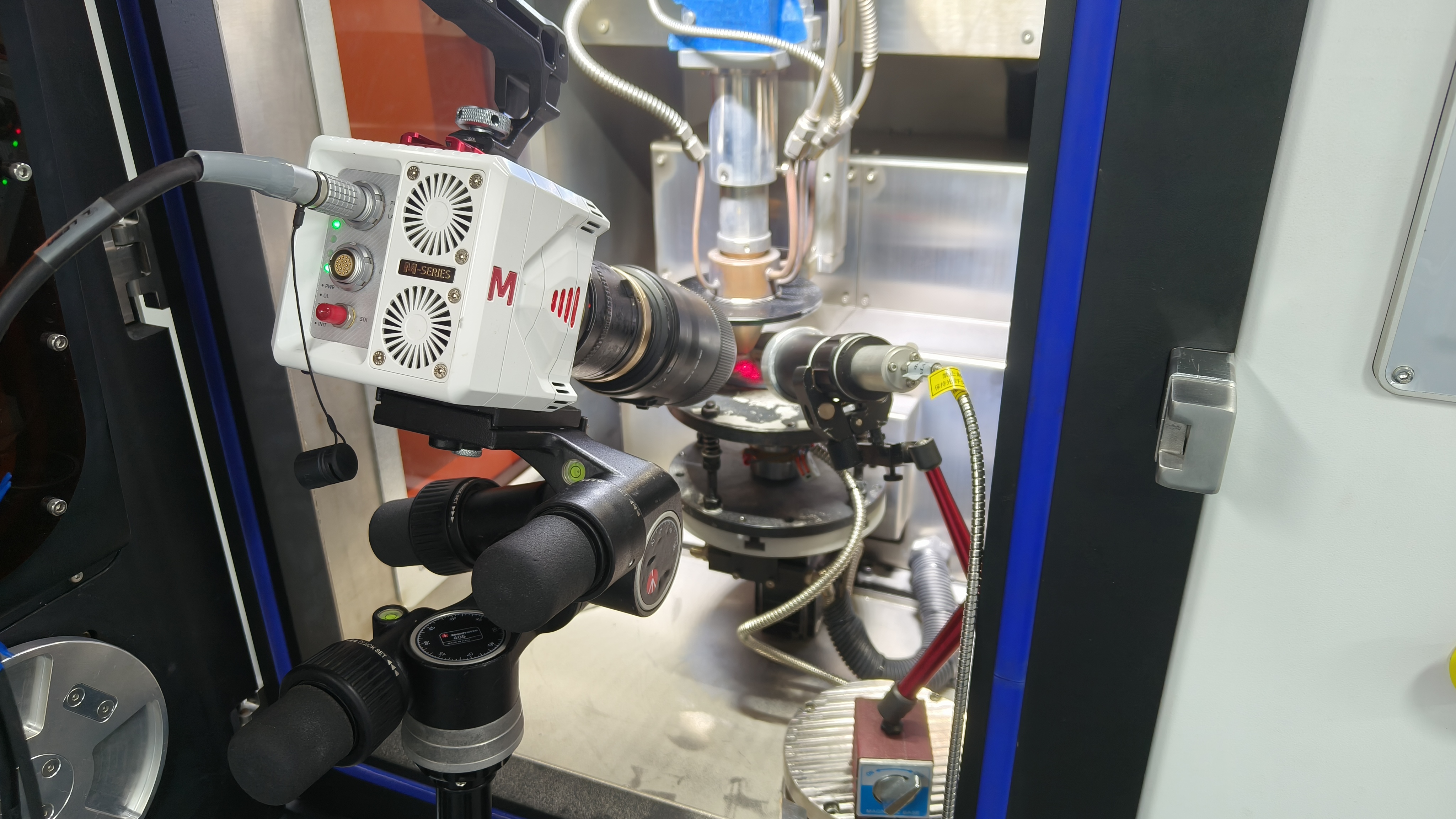
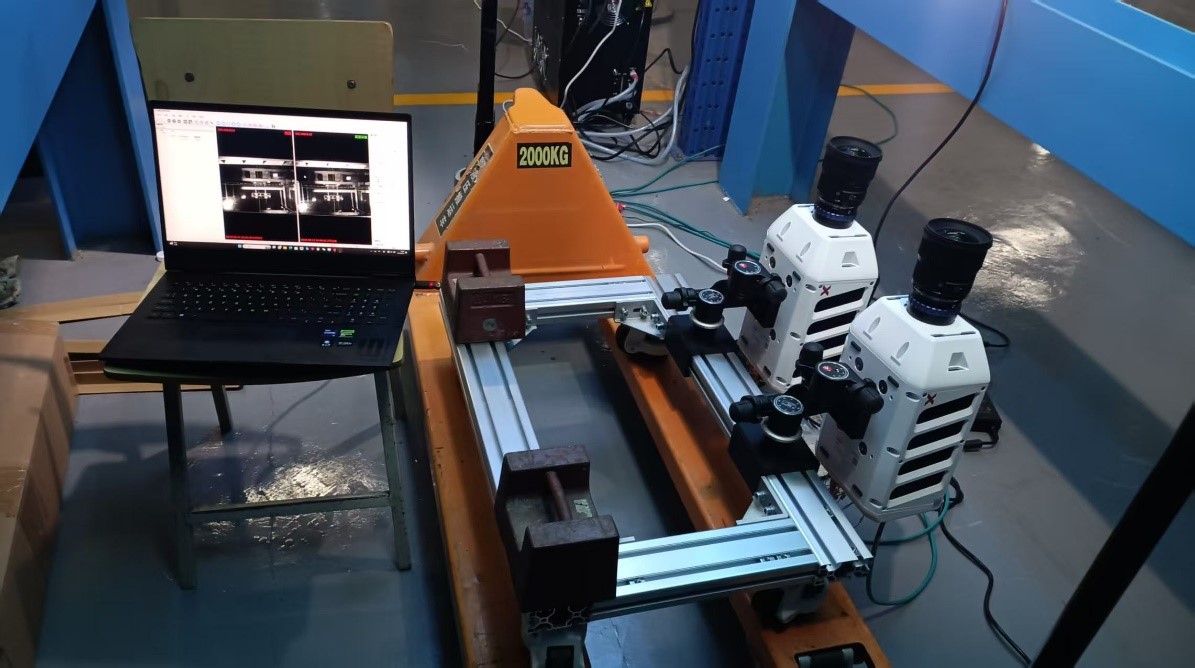
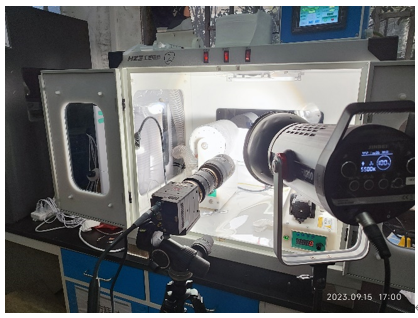
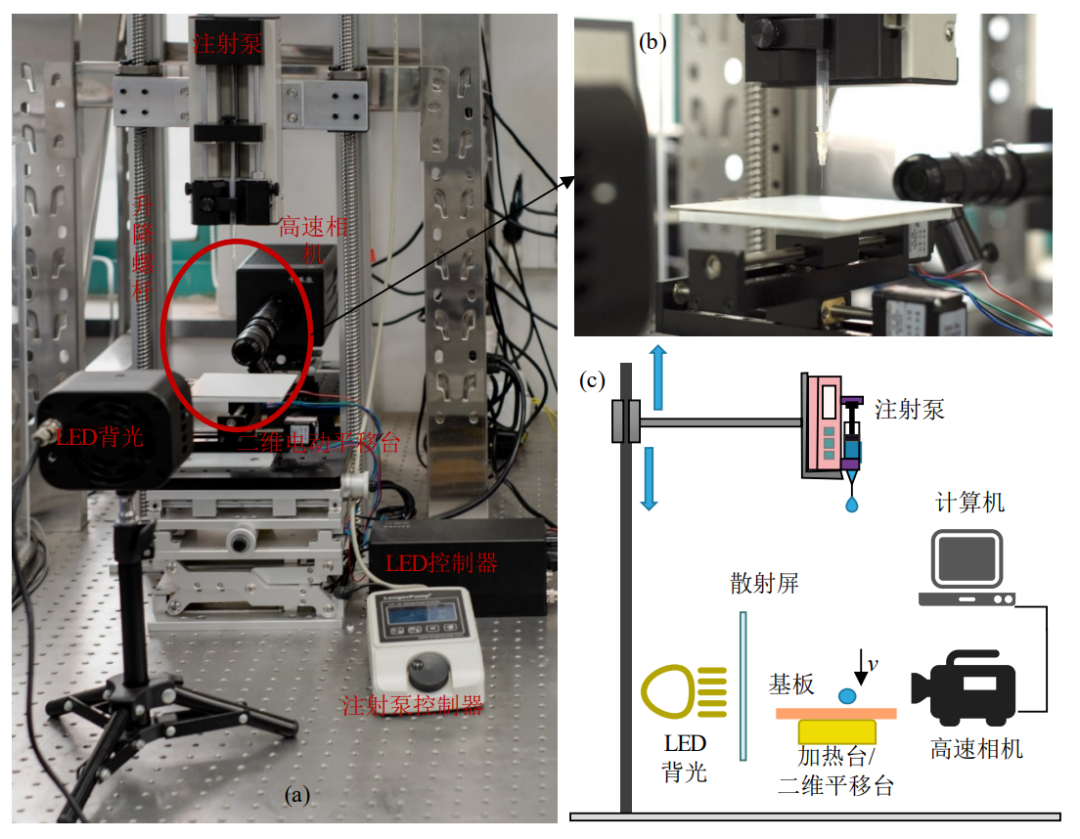
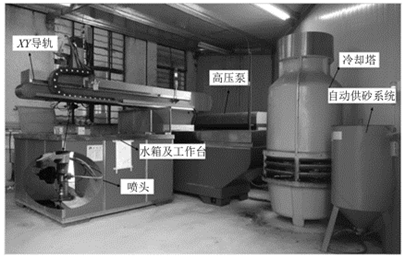
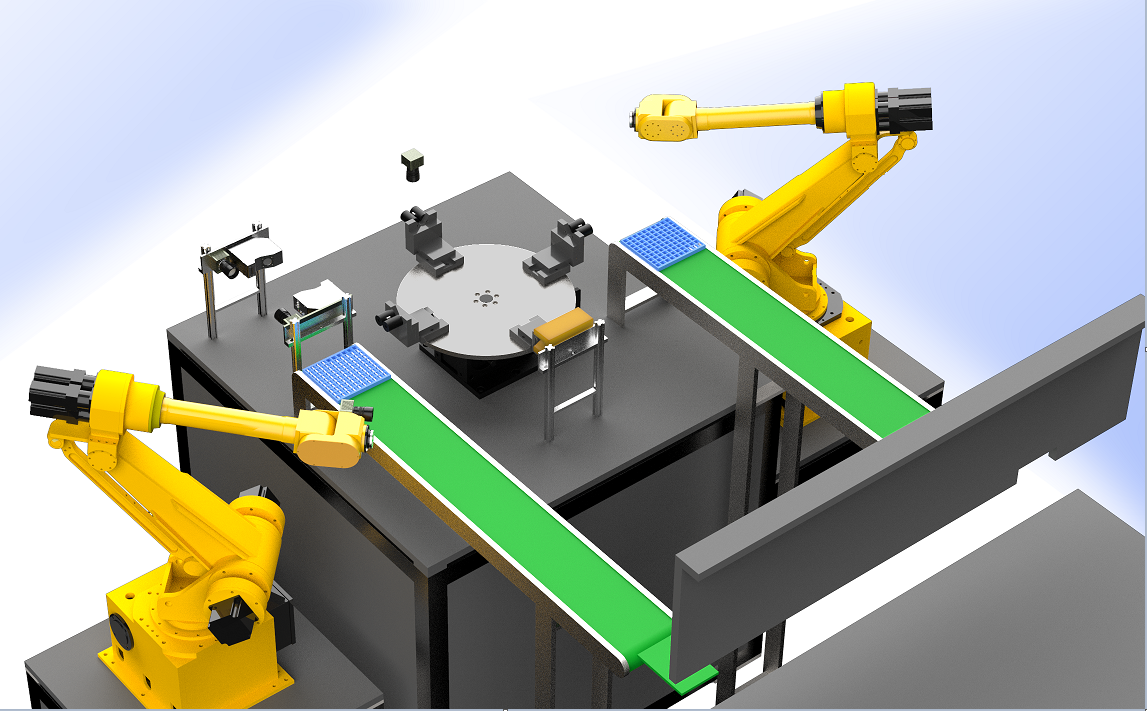
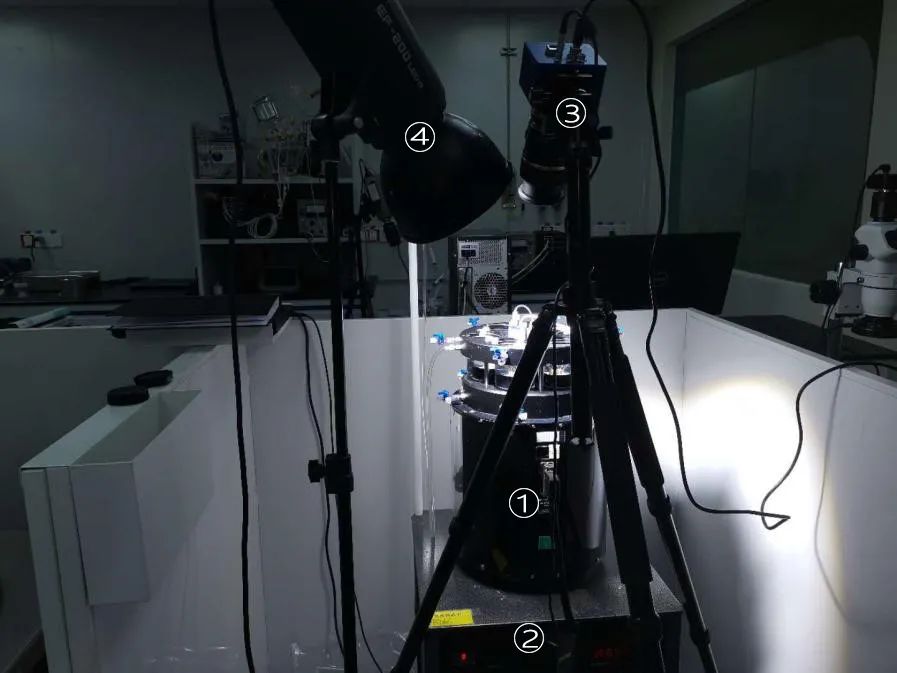
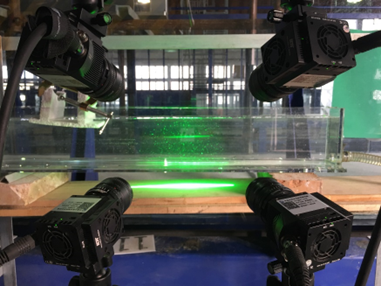
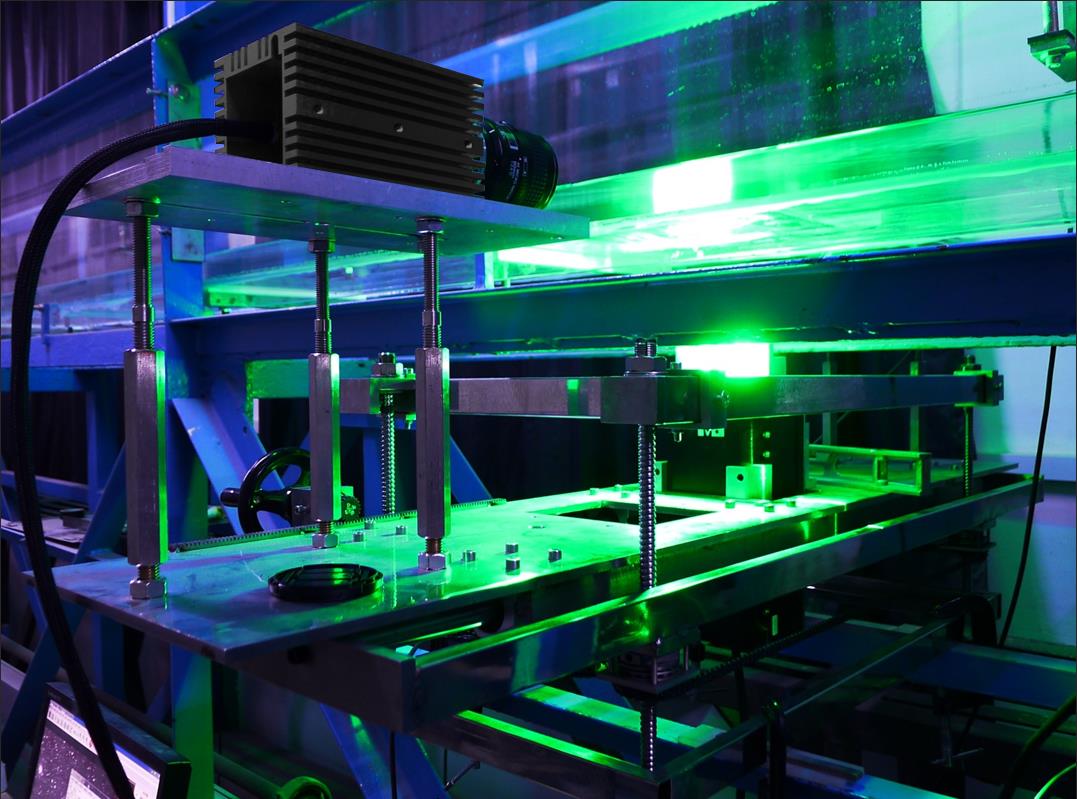
2实验设备
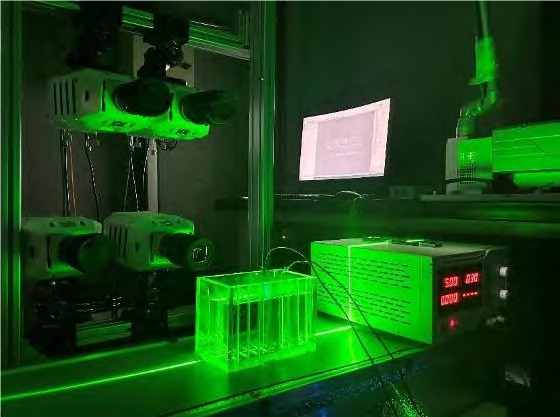
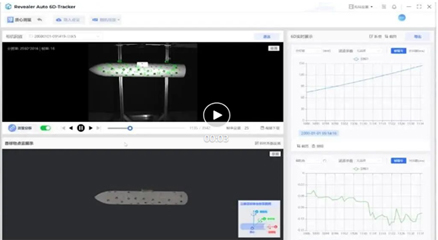
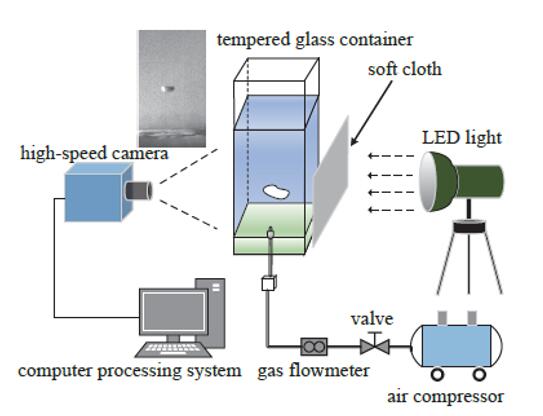
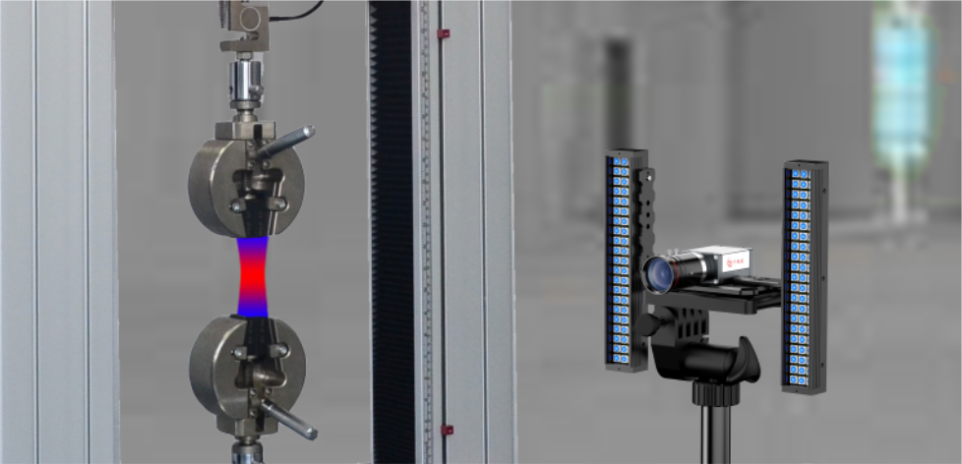
2)千眼狼PIV粒子图像测速系统:由2台PIV高速摄像机,532nm连续激光器,RFlow4流场测量软件。
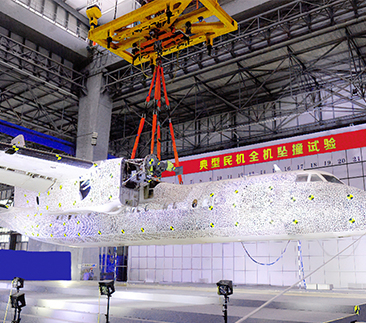
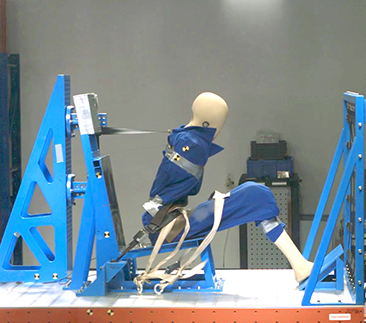
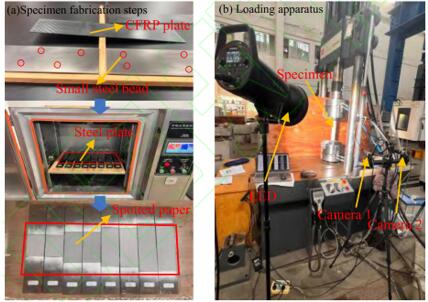
3实验步骤

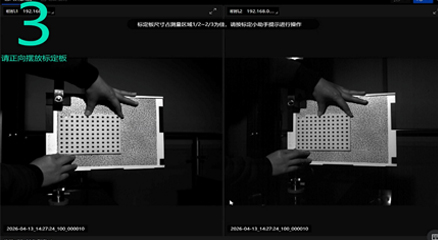
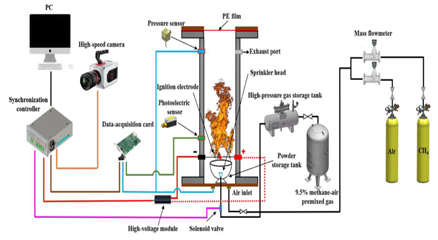
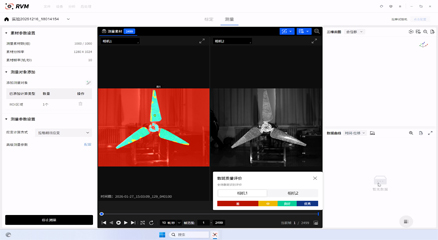
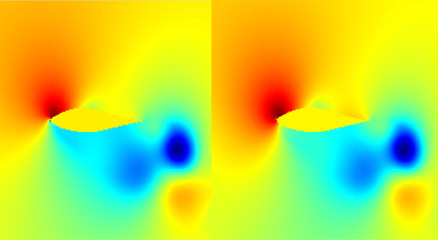
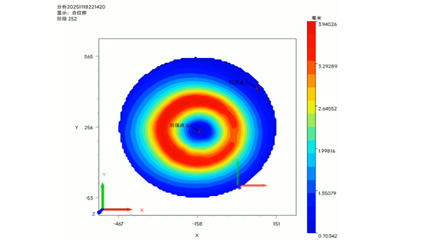
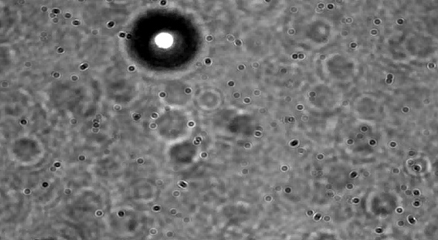
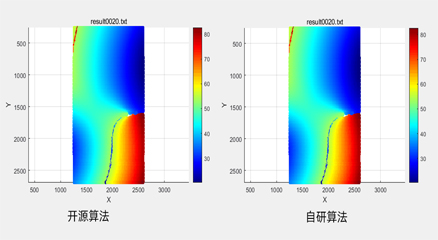
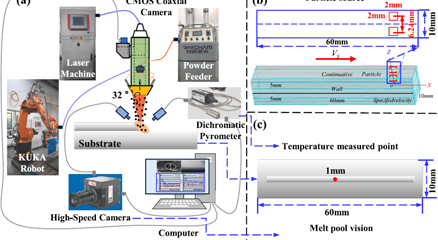
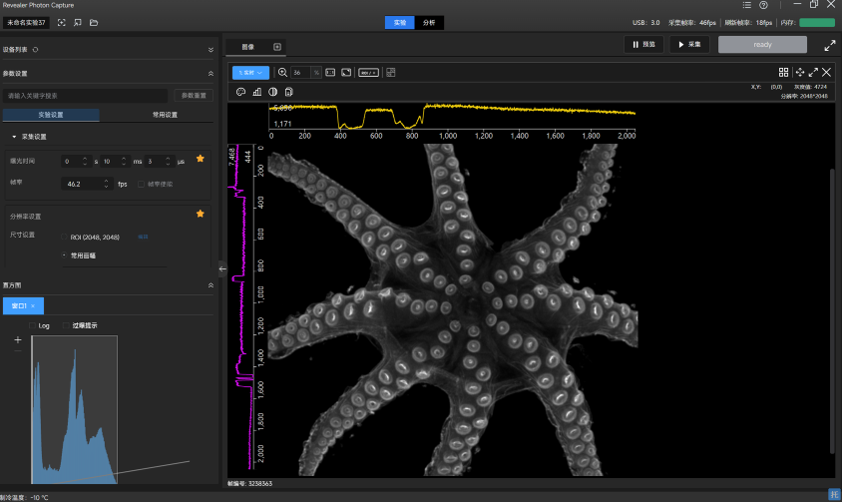
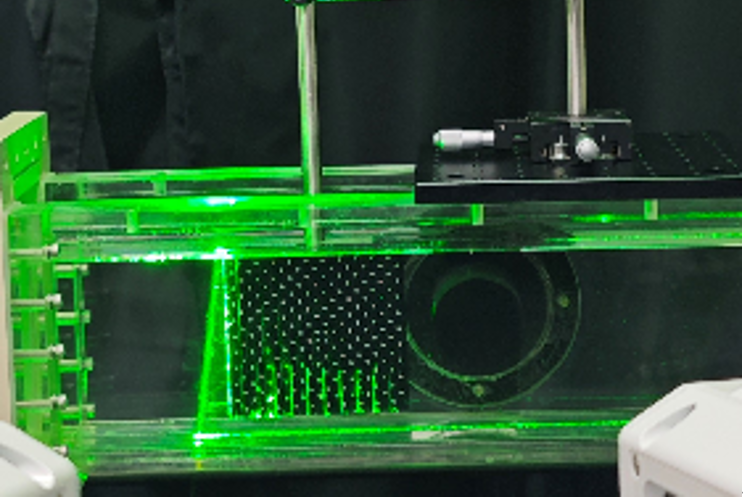
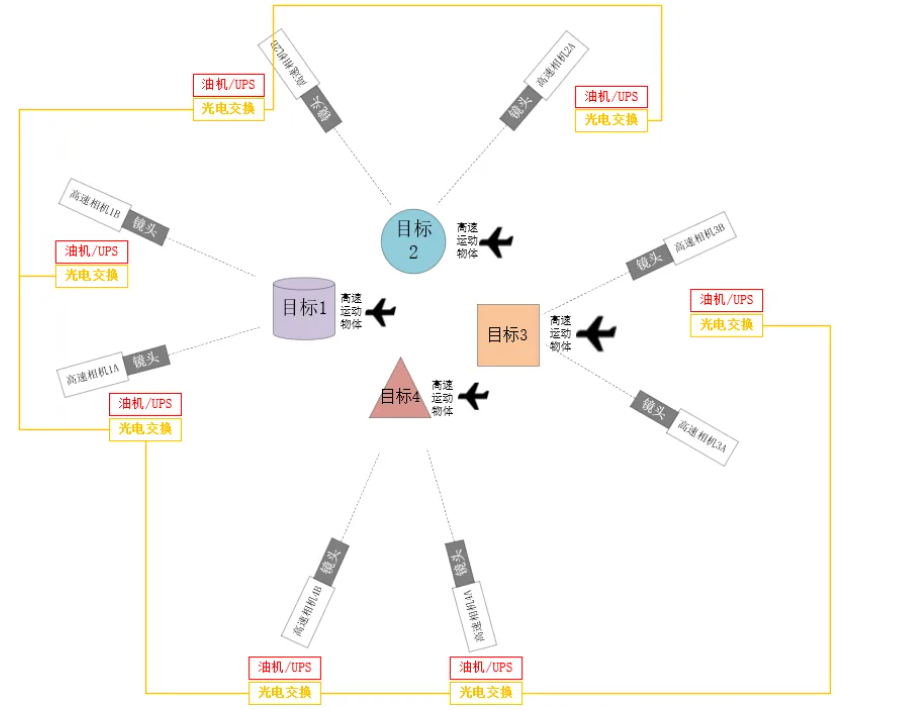
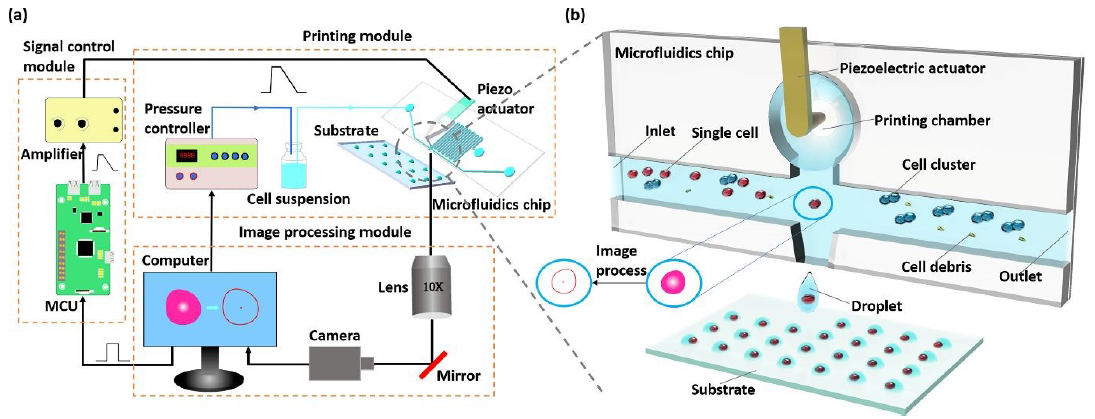
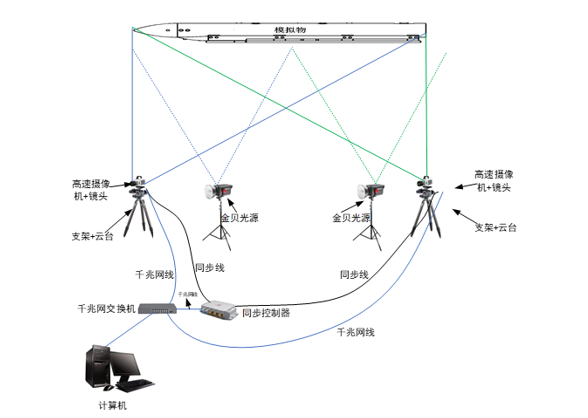
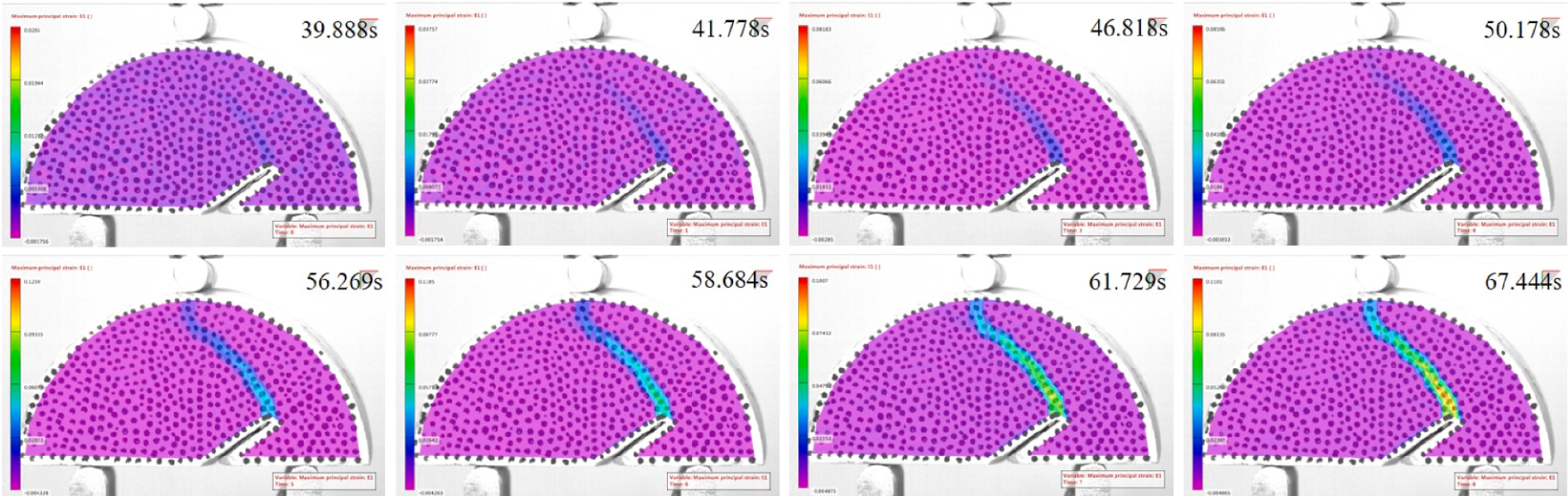
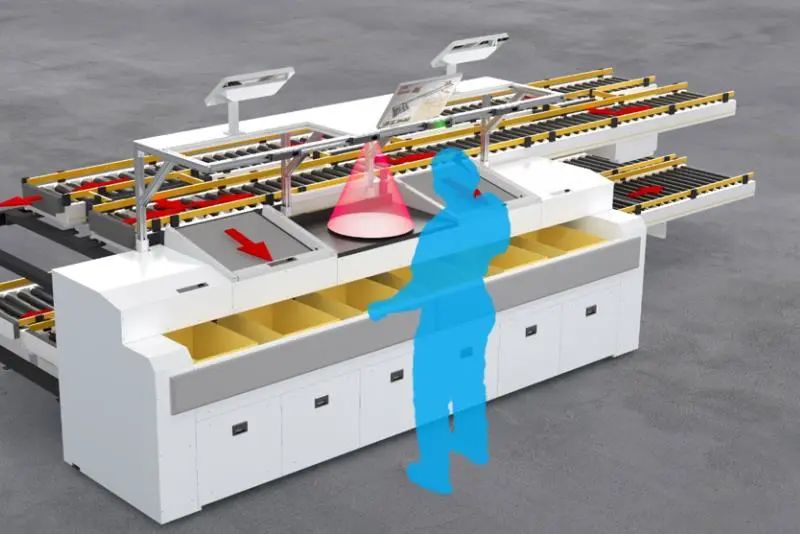
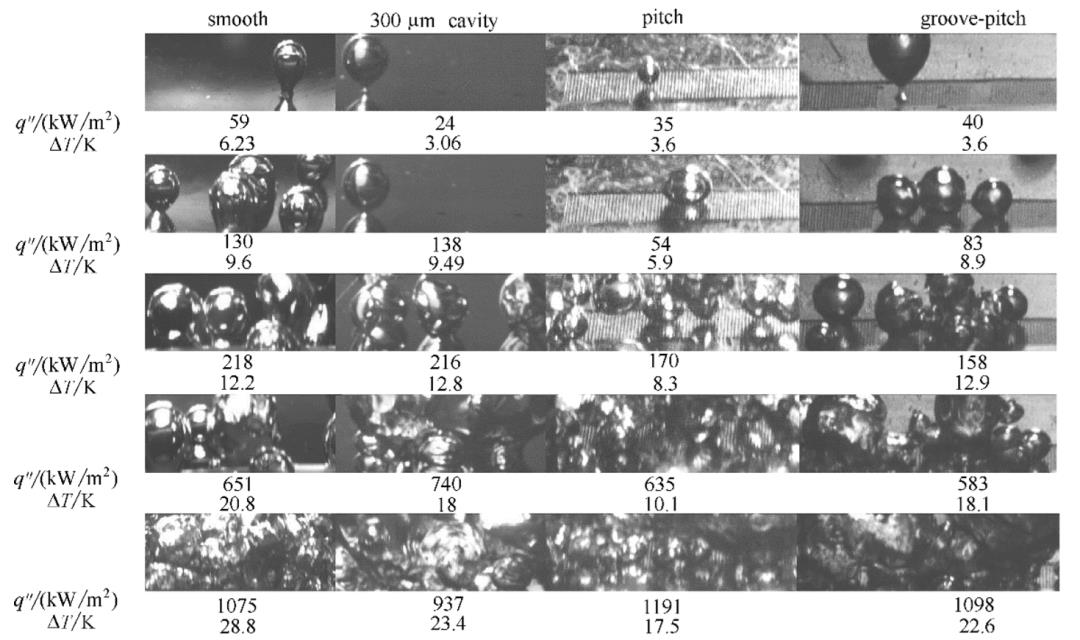
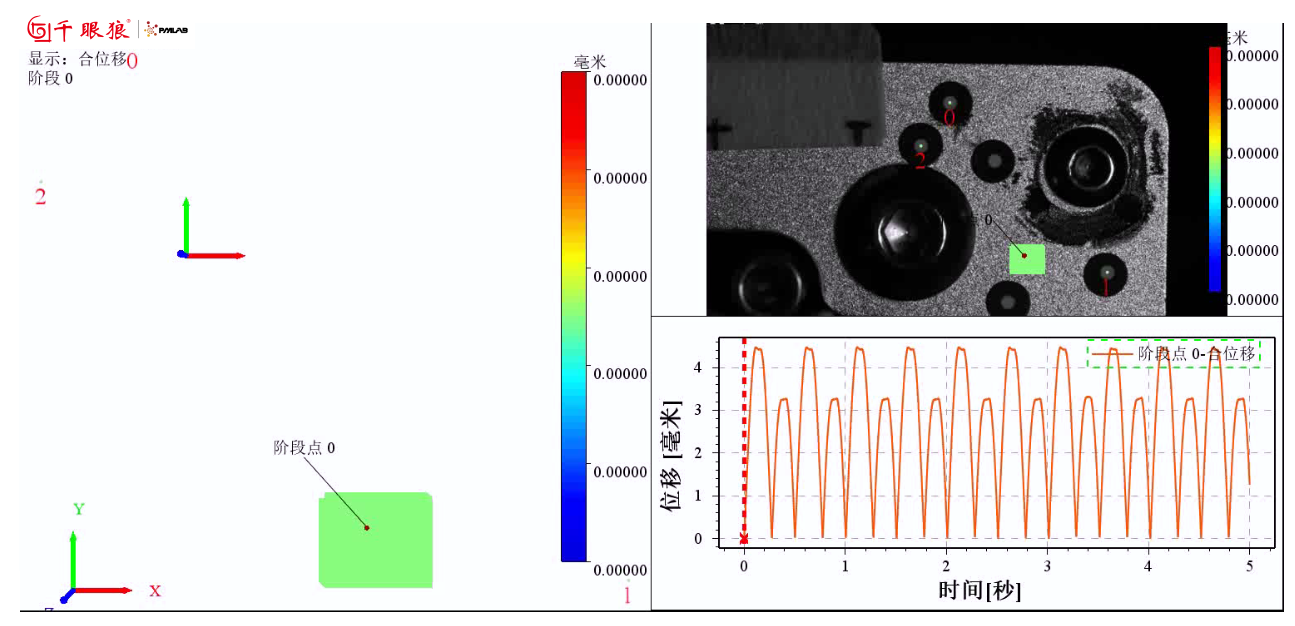
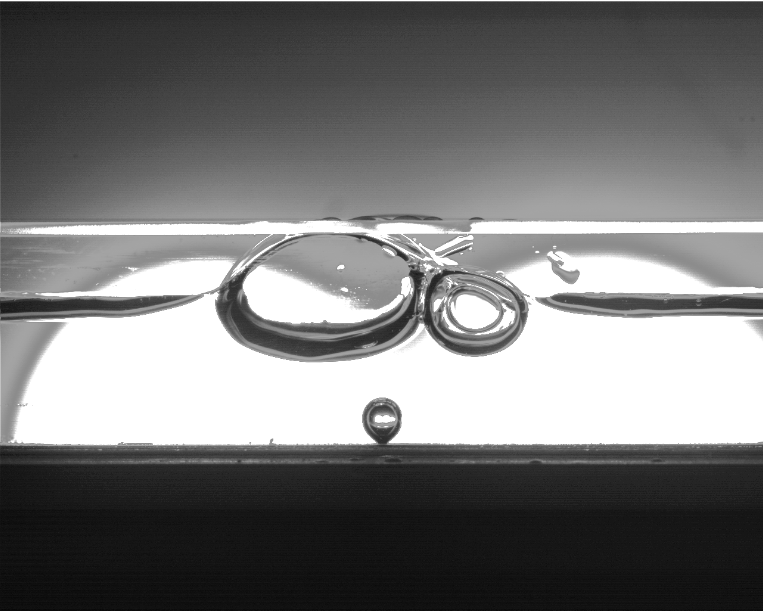
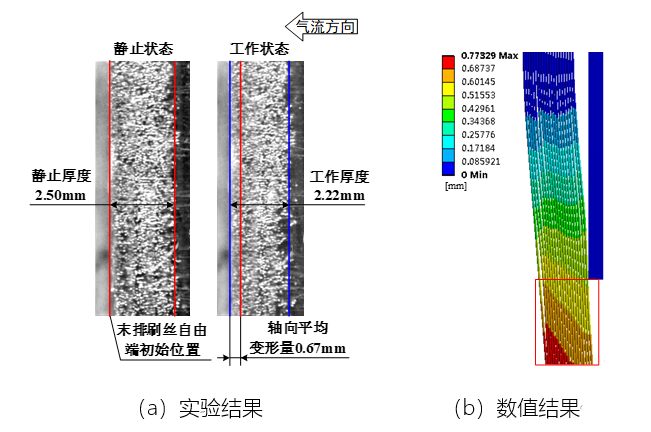
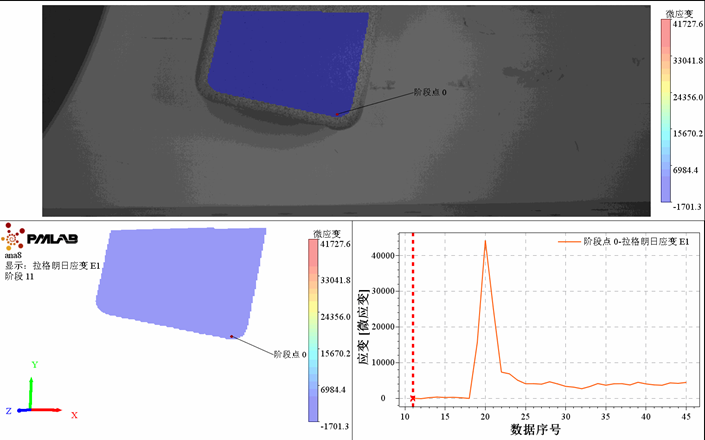
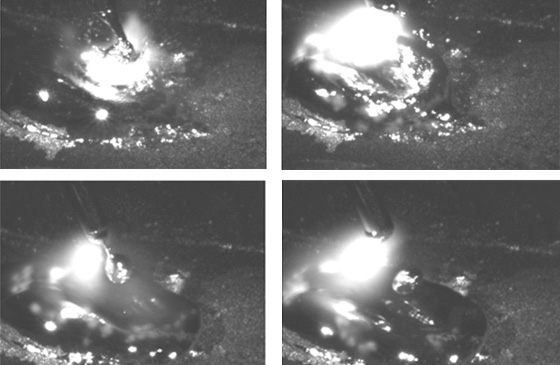
图2
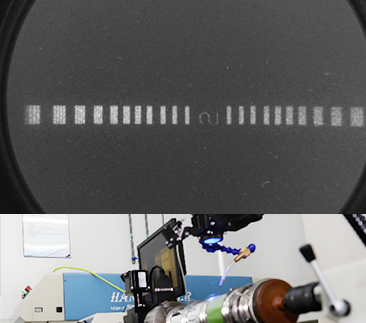
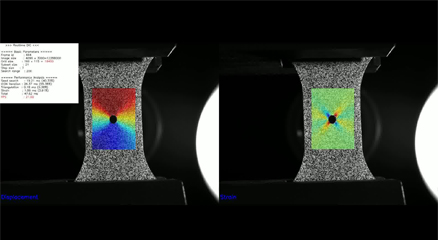
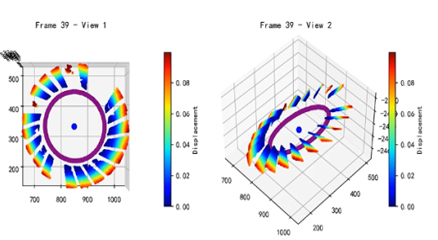
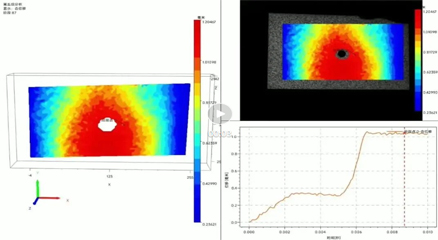
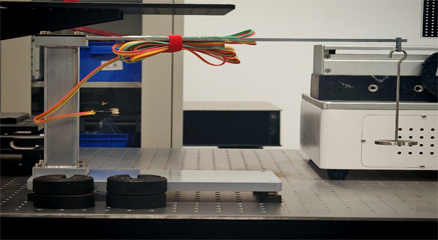
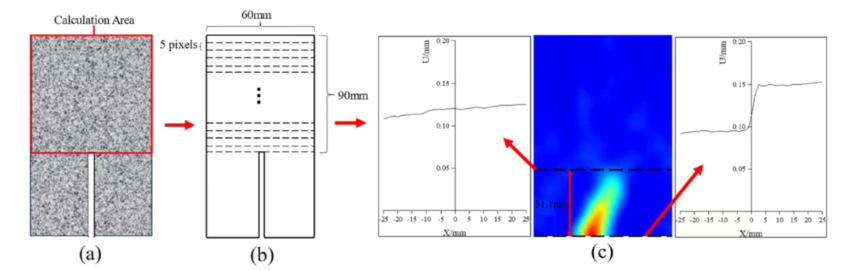
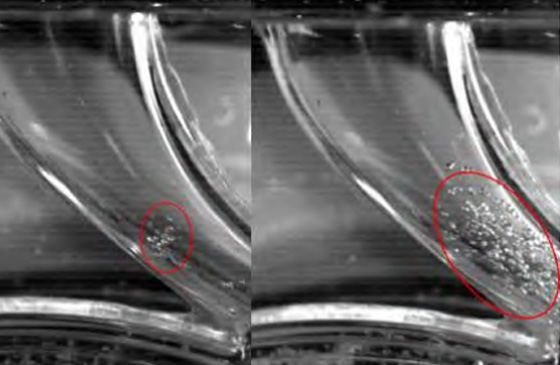
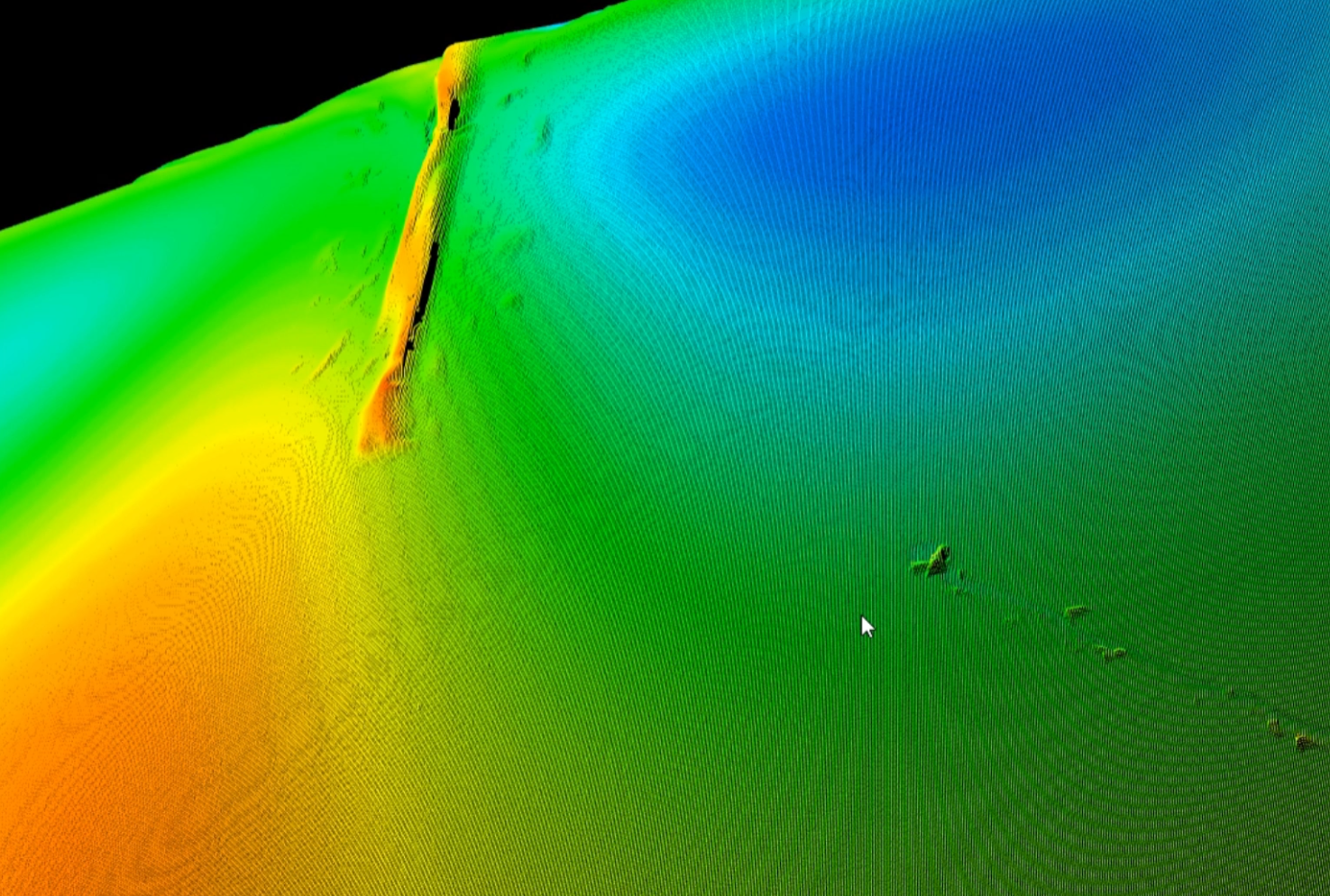
2)使用双层圆点标定板固定在位移平台上,放入水洞中,进行三维标定,左右相机视场重叠区热力图显示匹配误差<0.1 pixel。
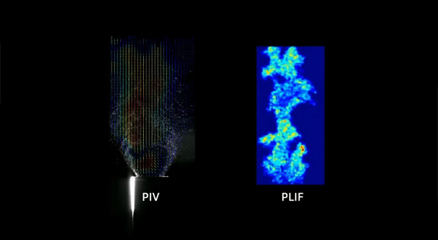
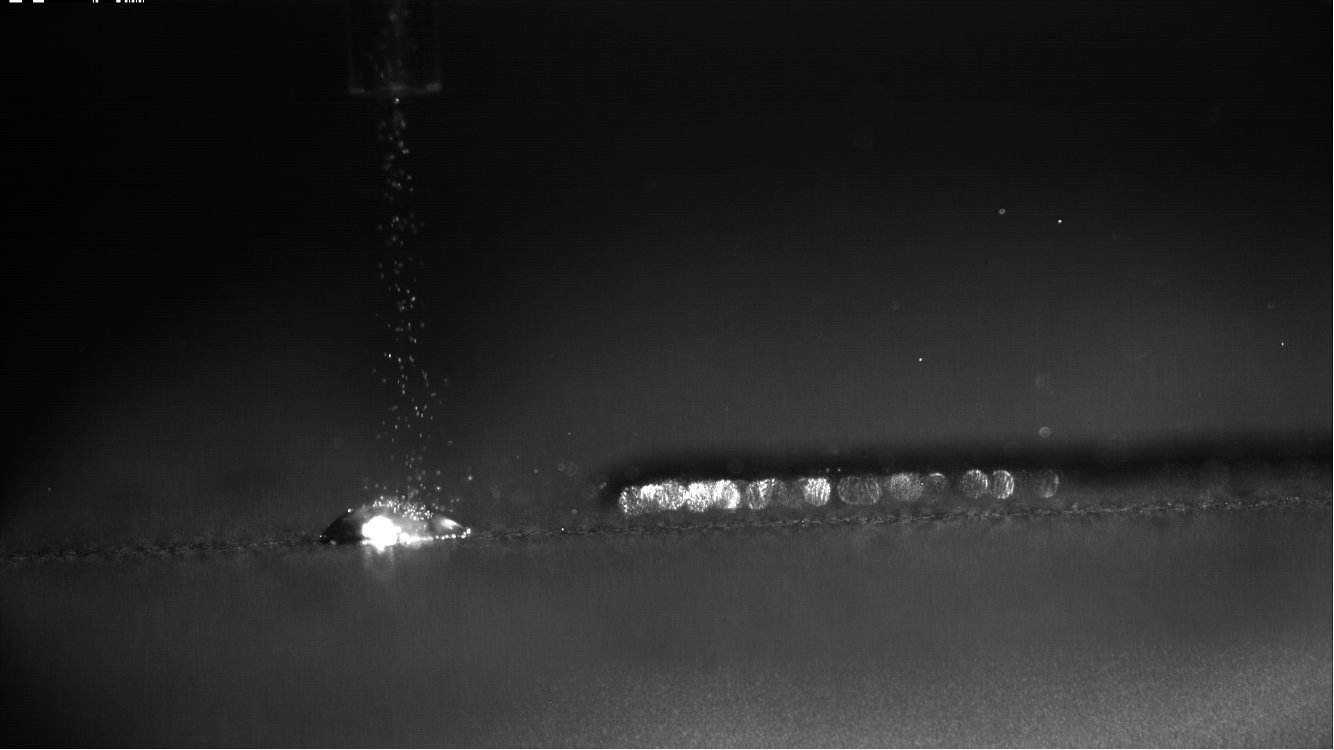
3)撤出标定板,注入示踪粒子,关闭环境光源,打开激光照明,激光平面与圆柱轴线对齐。
4)同步触发2台高速摄像机采集500帧粒子图像。
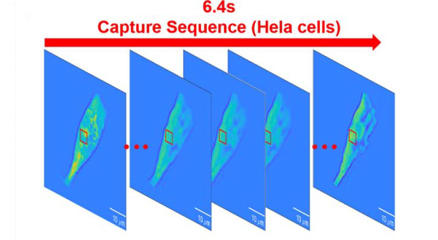
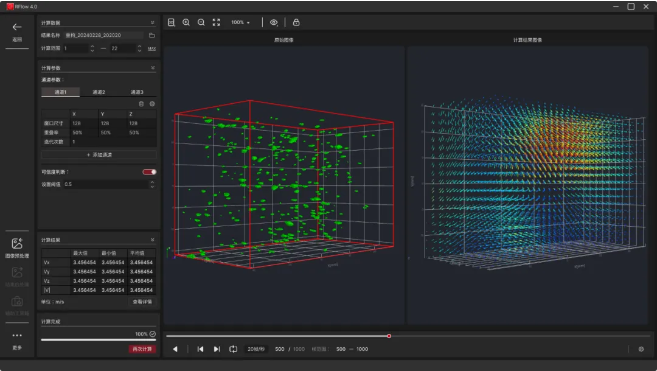
5)使用千眼狼流场测量软件RFlow,依次完成基于经典PIV-单通道方法的流场计算,基于伽利略/雷诺/POD算法的流场分解分析,基于Q准则/λ₂法的涡结构识别分析,以验证对侧布局方式流场观测有效性。
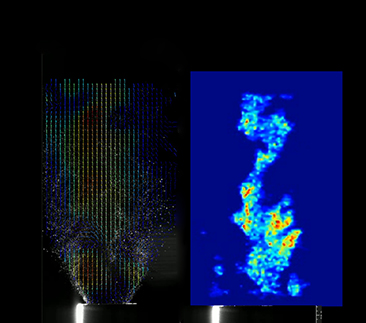
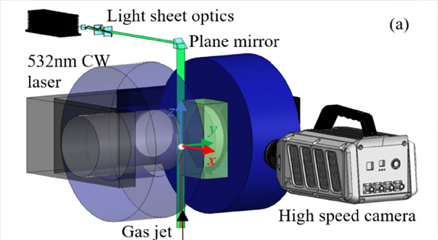
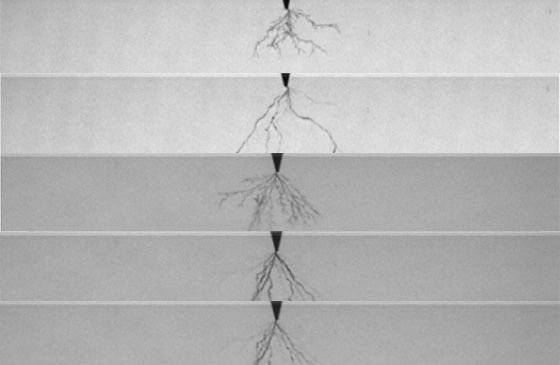
4实验数据
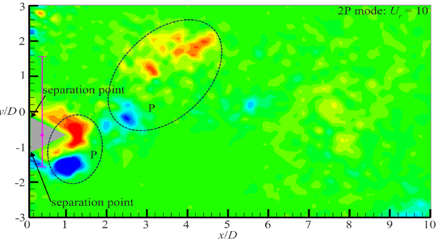
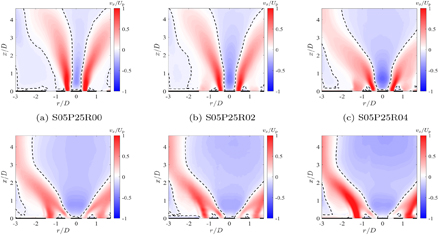
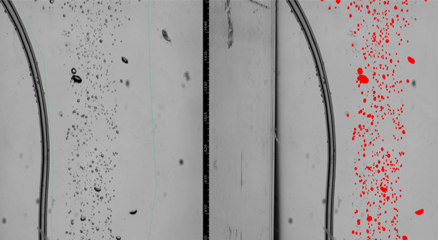
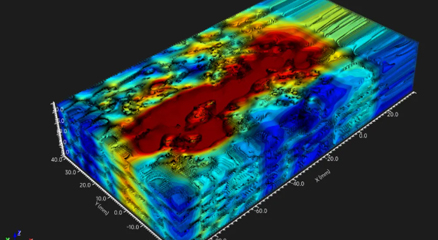
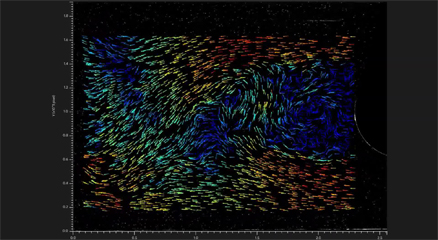
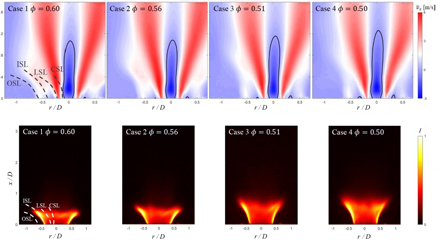
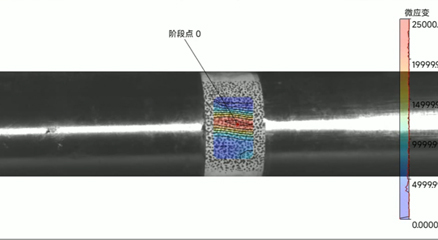
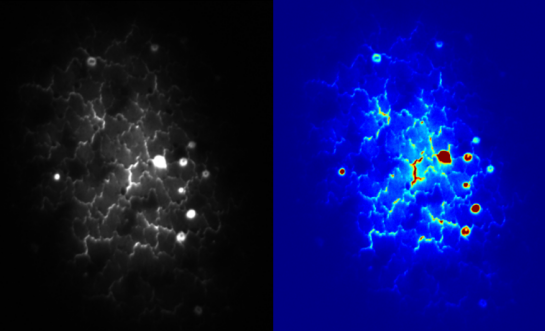
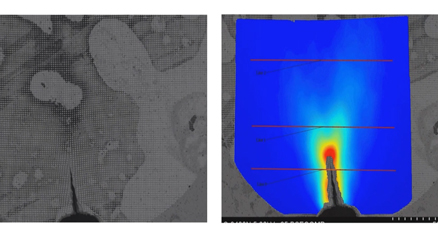
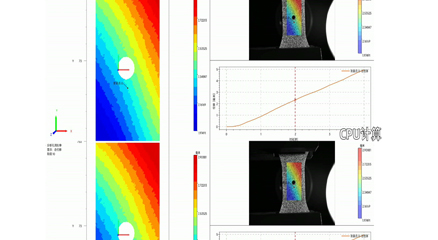
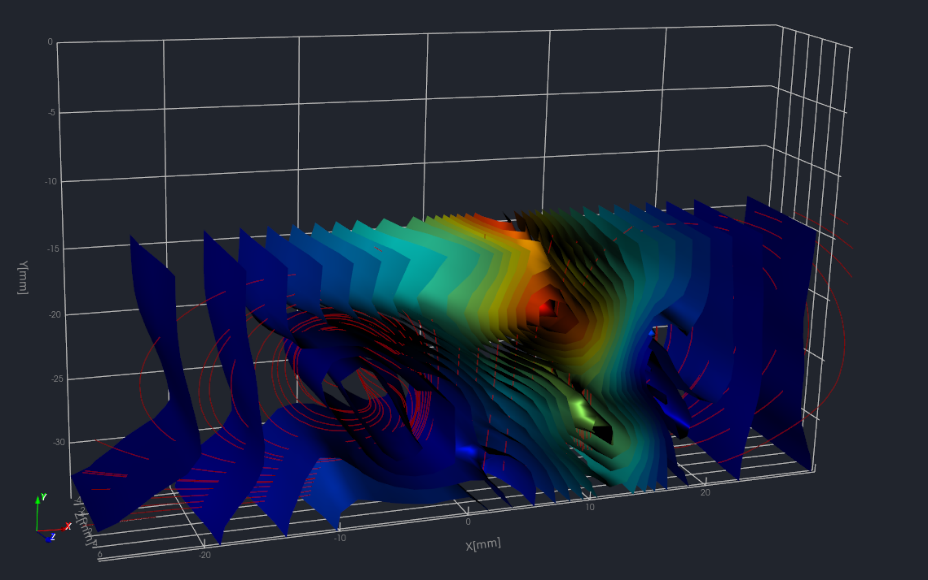
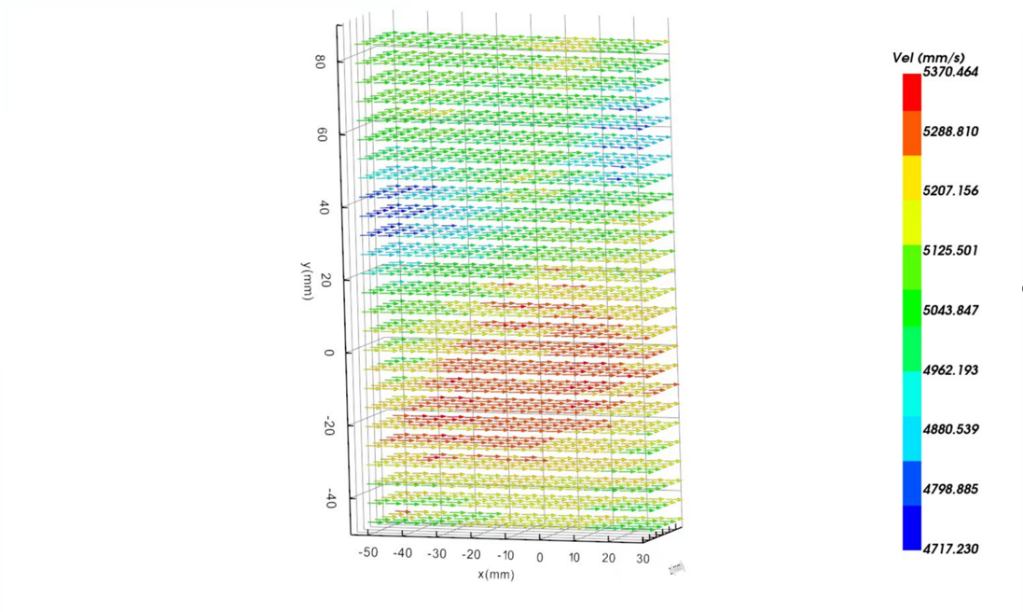
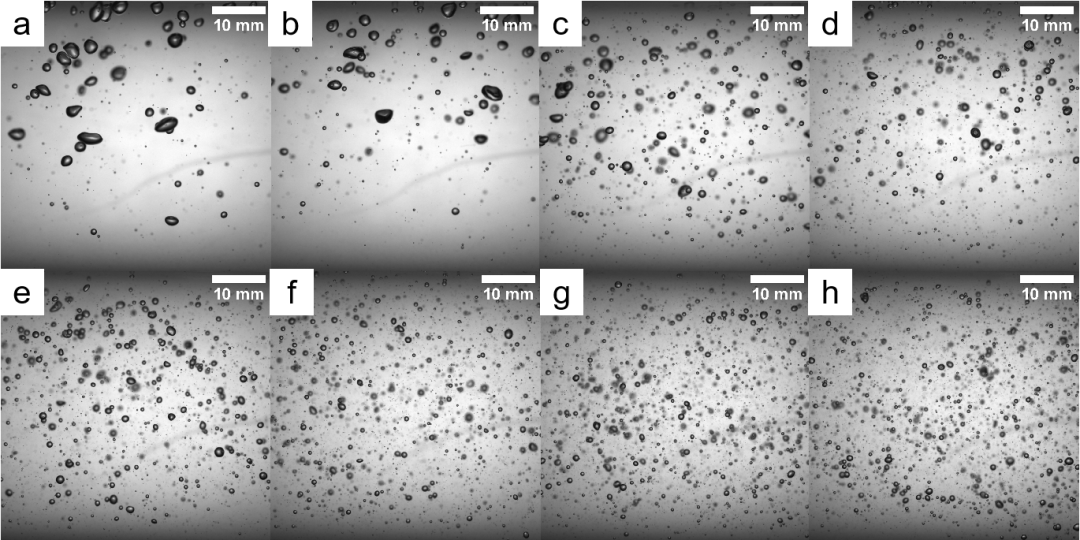
时均速度场云图,圆柱后方形成对称卡门涡街,尾流区速度降低。
脉动速度场雷诺分解云图显示,高频湍动能集中于涡脱落区。

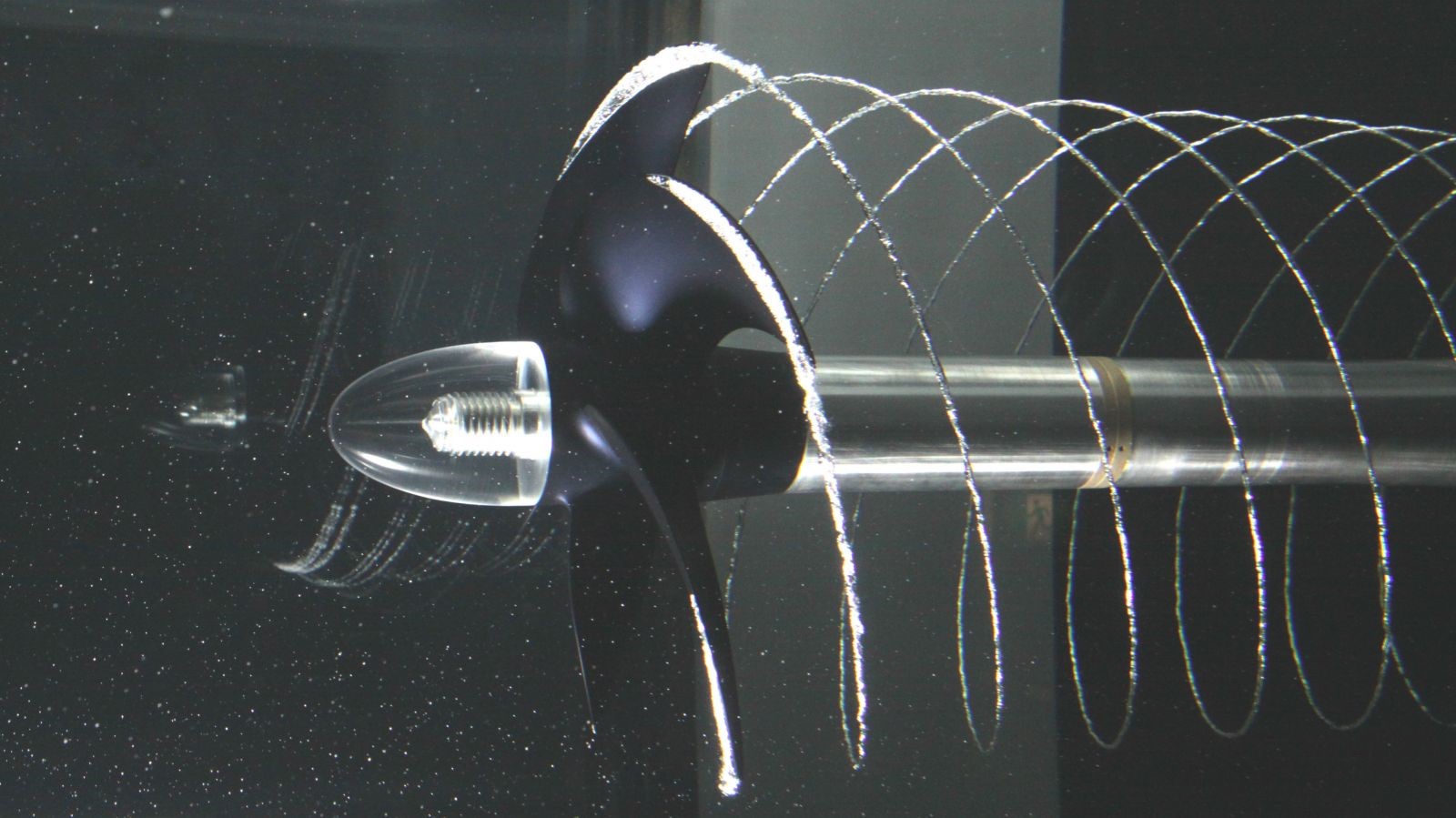
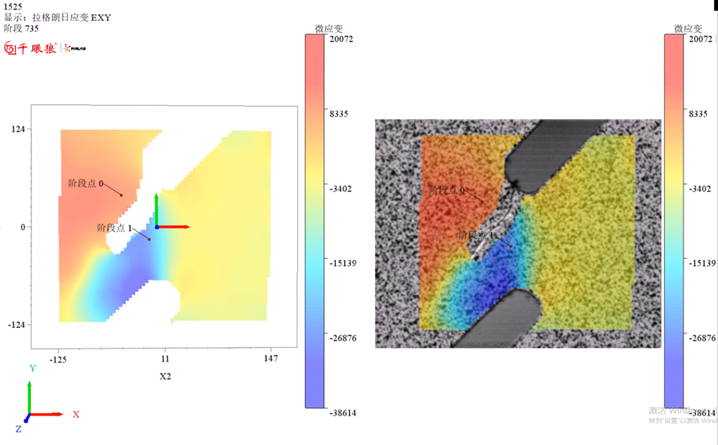
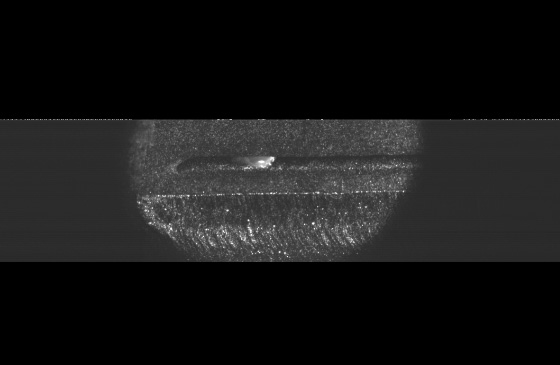
图3
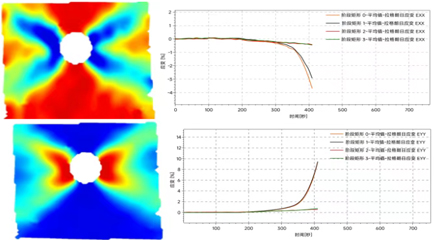
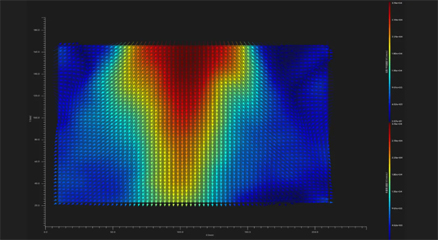
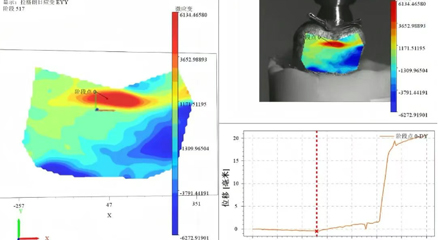
2)流场稳定性验证
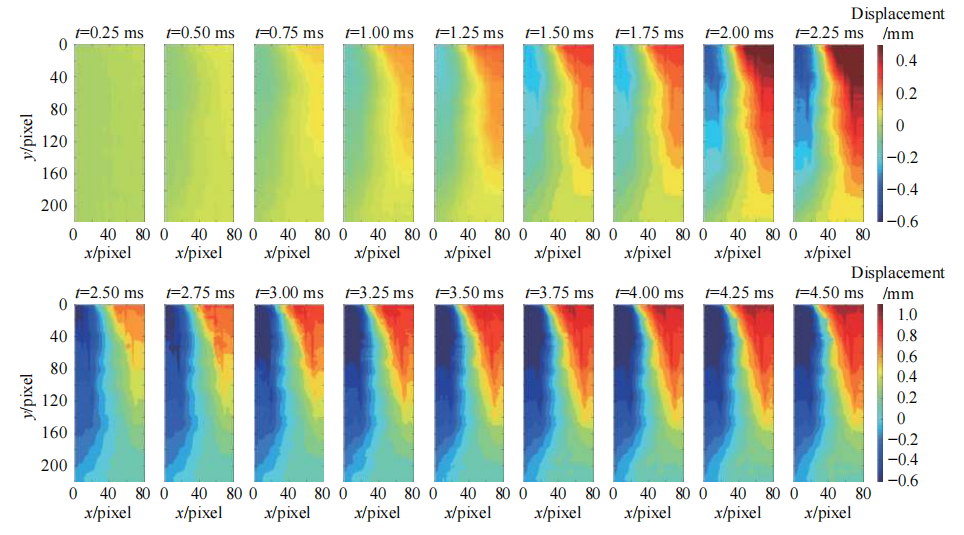
通过伽利略分解法分析流场扰动速度幅值无增长趋势(图4),证实流场处于稳定状态,满足分析基本条件。

图4
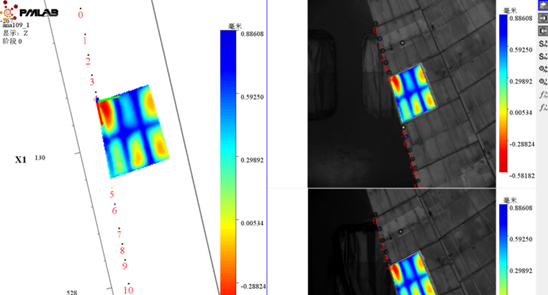
3) POD模态分析
前3~5阶模态主导能量分布,重构流场已保留主要物理特征。
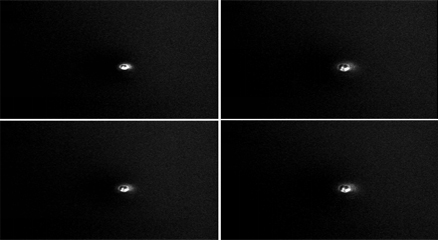
高阶模态(12阶)数值很小,云图基本都是蓝色(图5),表明12阶及其之后基本为噪声数据。
保存11阶模态及每帧数据对应该模态的幅值系数,使用前3~5阶模态重构出完整的流场物理学特性,之后更高阶可以带来更多的流场细节,但同时也会引入更多噪声(如图6),具体使用第K阶模态,可根据实验目标灵活调整。

图5

图6
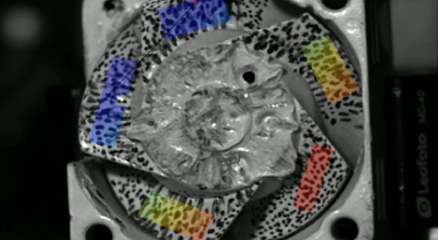
4) 涡结构识别
分别采用Q准则(图6左)、λ₂准则(图6右)进行涡结构计算。
Q准则下可清晰区分涡核与剪切层。λ₂准则下涡核和涡边界识别最为清晰,但计算时间较长。

图6
5实验结论
2)基于对侧布局方式捕捉的2D3C序列流场图像,利用RFlow流场测量软件POD分解法进行流场特性分析,使用前3~5阶本征模态重构可较为完整、低噪表征核心流动结构。
3)涡识别两种准则可计算表征涡的生成、发展、脱落以及相互作用的过程,Q准则可作为常规分析默认方法,精细化分析需求建议采用λ₂准则。

微信公众号

官方抖音